



 作者:百姓评车
作者:百姓评车 来源:百姓汽车
来源:百姓汽车 时间 2024-07-13
时间 2024-07-13 浏览:24589
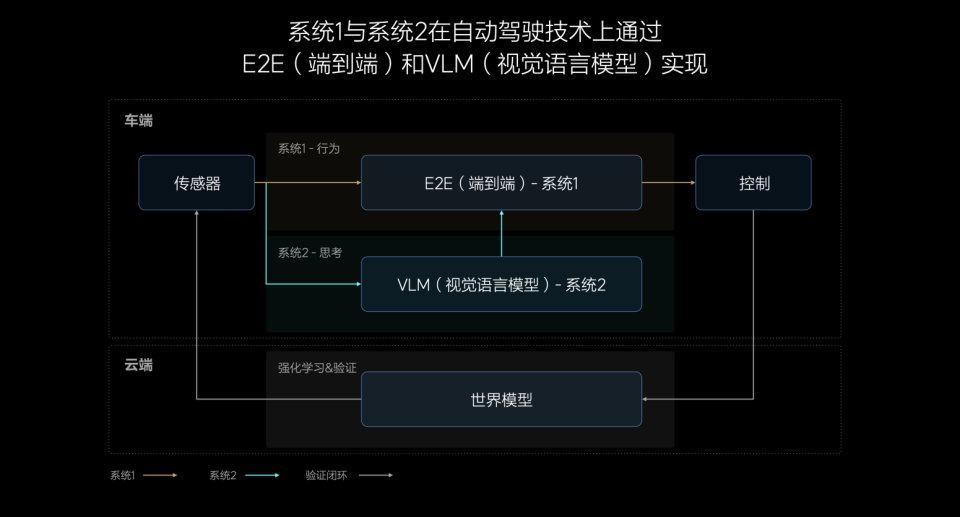
浏览:24589近日理想汽车发布的新版无图NOA系统,即不依赖高精地图的领航辅助驾驶系统,并首次公开了端到端自动驾驶技术架构。跟华为、小鹏的分段式端到端方案相比,理想方案的方案更为激进,可视为分段式端到端的下一站。理想的自动驾驶技术发布后,端到端技术再一次成为高阶智驾领域的热门词汇。

智驾行业技术路径切换得太快,去年行业的主流方案是轻高精地图的城区智驾,今年各大车企已经在追击端到端。这是车企智驾团队的研发难题,上一代方案还没完全落地,下一代方案又将到来。自动驾驶底层逻辑陡然转向,端到端结构为何突然成为兵家必争之地?
端到端架构强在哪里?
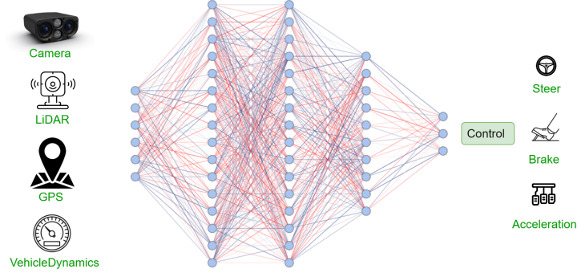
端到端架构是近来自动驾驶领域最前沿的技术路线,端到端自动驾驶方案是人工智能领域中的一个重要概念,它是指从传感器输入直接到执行机构输出的无中间决策层级的自动驾驶实现方式。这是将自动驾驶系统中不同的架构、模块融合成一个完整的统一体,直接完成输入到输出的训练。
端到端智能驾驶技术是一种创新的自动驾驶解决方案,与传统分模块方案有显著区别。在传统的自动驾驶系统设计中,感知模块负责通过各类传感器,如摄像头、雷达、激光雷达等收集环境信息,识别道路、车辆、行人、交通标志等元素,规划模块基于感知模块提供的信息进行路径规划和决策制定,控制模块则依据规划结果执行具体动作。
端到端技术打破了这种模块化的界限,端到端大模型上车后,智驾车在不同环境中作出何种反应不再需要工程师一条一条写出答案,AI会模仿人类的思考决策逻辑。由于大模型会将过去的路跑经验吸收保留,并且使用过去的数据反复思考某场景下怎么行驶最好,类似于一位老司机不仅拥有多年驾龄经验丰富而且经常用模拟器训练驾驶技术,那么应对各种场景自然越来越灵活。
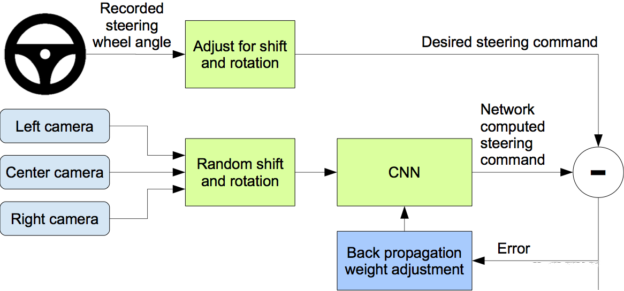
其实端到端并不是一个全新的概念。2016年英伟达就提出采用单个神经网络来实现端到端的自动驾驶。但由于结构设计过于简单,模型的规模也过小,这种方案仅能支持高速或者简单道路状况下的自动驾驶,且仅仅完成了小规模的demo验证。
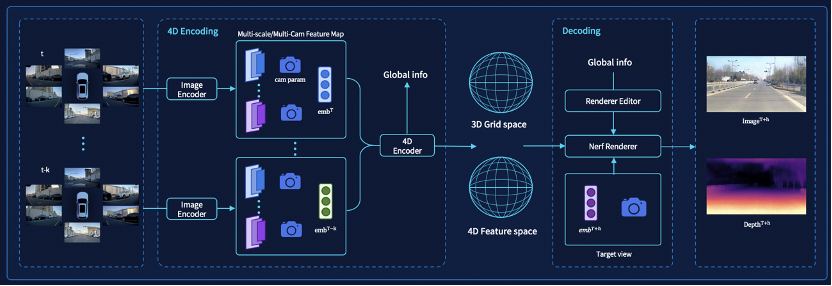
时至今日端到端自动驾驶已由早期的小决策模型,发展到巨大无比的模型,自动驾驶交互范式随之由在线交互,延伸到完全离线的学习。而AI算法和算力在端到端自动驾驶中会扮演愈加重要的角色。
智能驾驶领域的端到端模型能够有效捕捉并展现这种临界状态。因为在车辆行驶过程中,会产生大量符合现实物理规律的真实临界状态数据。而端到端模型是实现物理世界中通用人工智能的关键组成部分,它能够利用来自现实世界的真实数据,帮助AI更好地理解和响应各种复杂情境。
端到端上车难度多大?
其实端到端技术真正应用于量产车上有很大的难度。可解释性是端到端自动驾驶的一个弱点。尤其是对于单模块端到端自动驾驶模型,实现可解释性极为困难,虽然可以将注意力权重可视化来提供部分解释性,但可靠性和实用性仍然十分有限,难以对事故、售后定责等问题给出有效的证据。对于分模块的端到端系统,虽然可以将中间结果抛出以提供更多的信息,但是这种信息往往是神经网络的隐层特征,跟直观的、真实的证据链还是有一定的差距,难以跟客户解释清楚。
而云端系统为了处理数以百万计的信息,一般都采用复杂的网络结构、巨大的网络参数,比如高达10亿甚至更多,再用成千上万张A100进行训练。但是车端往往只有非常低的算力、非常低的功耗,却要求极高的帧率,每秒处理的图片数量,极低的延迟,这导致端到端自动驾驶上车十分困难,只有经过大规模的量化剪枝等提效手段之后才有可能。
从特斯拉的开发经验看,端到端智驾技术对于算力、算法和大数据的要求都非常高,如果没有足够的经济和技术实力很难实现。特斯拉也是通过大量测试才最终实现了FSD 端到端自动驾驶。所以要想把端到端做好并不容易,需要巨大的车队、巨大的算力、非常长时间在安全领域的浸润。

针对端到端上车的难题,车企们也给出了不同的解决方法。特斯拉计划2024年底前对DOJO超算中心投资超过10亿美元,以提升总算力至10万PFLOPS。小鹏汽车也计划在2024年投入35亿元用于智能研发,并新招募4000名专业人才,今后每年还将投入超过7亿元用于算力训练。
车企的技术表现如何?
2023年8月特斯拉公布FSD V12版本时提到引入了端到端技术,今年上半年特斯拉FSD将入华的传闻甚嚣尘上,加速国内自动驾驶端到端大模型的研发和应用。国内小鹏汽车是首个发布端到端大模型量产上车的整车企业。
何小鹏认为端到端大模型将让自动辅助驾驶过渡到完全自动驾驶的时间大幅缩短,2025年,小鹏汽车就能在中国实现类L4级智驾体验。这或许意味着小鹏汽车可以跳出眼下智驾卷城的混战,因为端到端大模型上车后,小鹏的车可以在无图的前提下,做到每一条路都能开。
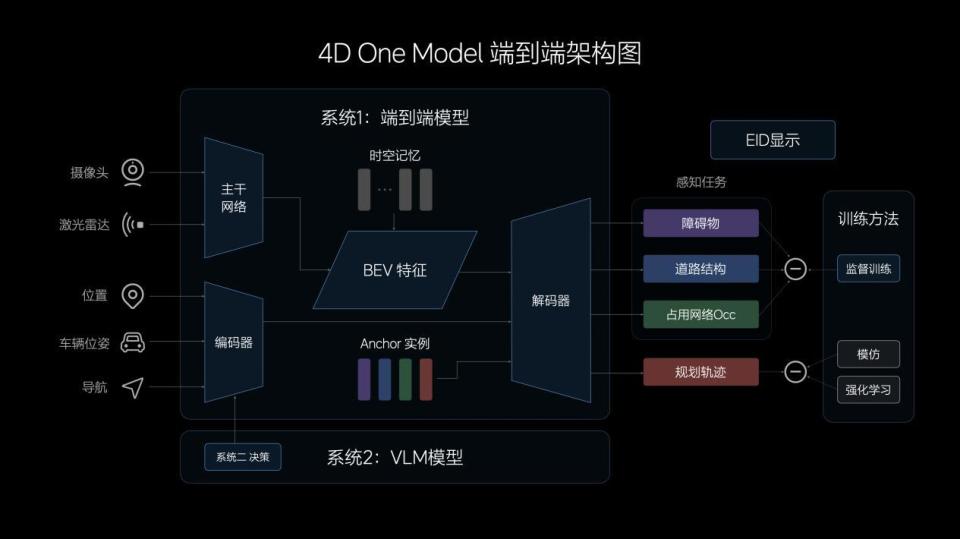
同样作为造车新势力的蔚来汽车和理想汽车,也在进行端到端模型技术的研发部署。其中理想提出的端到端One Model结构,输入端是传感器信息,输出端是行驶轨迹。不过这个思路并非理想独有。此前商汤绝影提出的端到端自动驾驶方案UniAD也是类似思路,该模型还拿到了2023年全球顶级计算机视觉会议CVPR的最佳论文奖。
新势力不断出牌,传统车企也在奋进追赶。4月15日在长城汽车董事长魏建军的直播首秀中,新款魏牌蓝山车型搭载的端到端智驾方案就曾引发外界关注。同时小马智行、英伟达、元戎启行、商汤绝影等产业链企业也在端到端领域发力。去年小马智行将感知、预测、规控三大传统模块打通,统一成端到端自动驾 驶模型,目前已同步搭载到 L4 级自动驾驶出租车和 L2 级辅助驾驶乘用车。

至于端到端架构何时上车,据预测2025年起端到端发展的提速,将催化各级别自动驾驶功能渗透率大幅提升,而高速NOA渗透率至2026年将超过30%,城市NOA渗透率超过10%。
百姓评车
当下车企要在智能驾驶层面实现高效的数据处理,必须借助于端到端的技术。为了赢得高阶智驾的未来,大家都在瞄准端到端方案,都用自己的方式奋力奔跑。端到端大模型技术会取代感知、决策、控制这一传统路线,但这背后需要很高的研发投入,算力最烧钱,高投入也意味着更深的品牌护城河,那未来是否能带来销量和利润上的高回报,还要画个问号。

扫描分享微信好友

扫描分享微信朋友圈



电话:15501033393
邮箱:3681001@qq.com




